这里以Stanford机器人为例,说明逆运动学问题的解法。
Stanford机器人的D-H变换矩阵为(参见图5.13-33):
求逆运动学问题时臂矩阵T的各元素是已知的。由 的第四列得W点在定系中的坐标为
的第四列得W点在定系中的坐标为

再从(5.13-23)式右边合成矩阵和 的第四列得W点在第一杆系中的坐标为
的第四列得W点在第一杆系中的坐标为
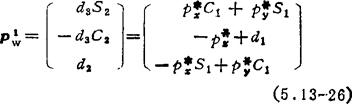
由第三式得  。
。
设 ,于是
,于是 ,
,
解得t,并求出
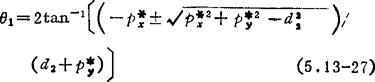
由第一、二式得 /
/ (5.13-28)
(5.13-28)
由第一、二式的平方和得

θ1有双解,θ2因θ1有双解而有双解,d3总大于零,因此负号无意义。下一步求θ4、θ5和θ5。设:

由于θ1、θ2和θ3已知,由此计算出T1,再由(5.136)式计算 。T是给定的,故由(5.13-30)式可计算出T2的诸元素的数值。由于r2=3A44A55A6,左乘:
。T是给定的,故由(5.13-30)式可计算出T2的诸元素的数值。由于r2=3A44A55A6,左乘: ,得
,得 (5.13-31)
(5.13-31)

从(3,3)元素相等,得

由(1,3)和(2,3)元素相等,得

由(3,1)和(3,2)元素相等,得

如果θ4、θ5和θ6都能旋转360°,则θ4、θ5和θ6有双解,其间的关系为

- 菜根谭·明洪应明 - “就筏思舍·无事道人”是什么意思
- 菜根谭·明洪应明 - “就身了身·以物付物”是什么意思
- 菜根谭·明洪应明 - “居安思危·天者无用”是什么意思
- 菜根谭·明洪应明 - “居官有节制·居乡敦旧交”是什么意思
- 菜根谭·明洪应明 - “履盈满者·必慎思之”是什么意思
- 菜根谭·明洪应明 - “山居有佳思·入尘觉赘旒”是什么意思
- 菜根谭·明洪应明 - “崇俭以养廉·守拙以全真”是什么意思
- 菜根谭·明洪应明 - “布被得天气·藜羹识性真”是什么意思
- 菜根谭·明洪应明 - “平庸不奇·和平之基”是什么意思
- 菜根谭·明洪应明 - “幸福祸本·贪生死因”是什么意思
- 菜根谭·明洪应明 - “幻中求真·雅不离俗”是什么意思
- 菜根谭·明洪应明 - “幼经磨砺·长后成器”是什么意思
- 菜根谭·明洪应明 - “彼自尘苦·缘其心尔”是什么意思
- 菜根谭·明洪应明 - “律己宜严·待人宜宽”是什么意思
- 菜根谭·明洪应明 - “得个中趣·会眼前机”是什么意思
- 菜根谭·明洪应明 - “德居人前·利在人后”是什么意思
- 菜根谭·明洪应明 - “德怨两忘·恩仇俱泯”是什么意思
- 菜根谭·明洪应明 - “心事宜明·才华应韫”是什么意思
- 菜根谭·明洪应明 - “心体莹然·不失本来”是什么意思
- 菜根谭·明洪应明 - “心体需光明·念头勿暗昧”是什么意思
- 菜根谭·明洪应明 - “心公不昧·诱惑不受”是什么意思
- 菜根谭·明洪应明 - “心善则子盛·根固则叶荣”是什么意思
- 菜根谭·明洪应明 - “心思兢业·趣味潇洒”是什么意思
- 菜根谭·明洪应明 - “心无物欲·坐有琴书”是什么意思
- 菜根谭·明洪应明 - “心无系恋·绝俗超尘”是什么意思
- 菜根谭·明洪应明 - “心无风涛·性有化育”是什么意思
- 菜根谭·明洪应明 - “心看圆满·心放宽平”是什么意思
- 菜根谭·明洪应明 - “心虚则性现·意净则心清”是什么意思
- 菜根谭·明洪应明 - “心闲日长·意广天宽”是什么意思
- 菜根谭·明洪应明 - “心静本体宽·水清月影明”是什么意思
- 菜根谭·明洪应明 - “心静自然凉·乐观无穷愁”是什么意思
- 菜根谭·明洪应明 - “忌高绝之行·戒偏急之衷”是什么意思
- 菜根谭·明洪应明 - “忍让为高·利人利己”是什么意思
- 菜根谭·明洪应明 - “志在林泉·胸怀廊庙”是什么意思
- 菜根谭·明洪应明 - “忘功念过·忘怨念恩”是什么意思
- 菜根谭·明洪应明 - “忘恩报怨·刻薄之尤”是什么意思
- 菜根谭·明洪应明 - “忙里偷闲·闹中取静”是什么意思
- 菜根谭·明洪应明 - “忠恕待人·养德远害”是什么意思
- 菜根谭·明洪应明 - “忧劳以兴国·逸豫以亡身”是什么意思
- 菜根谭·明洪应明 - “忧勤勿太苦待人勿太枯”是什么意思
- 菜根谭·明洪应明 - “快意早回头·拂心莫放手”是什么意思
- 菜根谭·明洪应明 - “念净释形·自得恬愉”是什么意思
- 菜根谭·明洪应明 - “念头稍异·境界顿殊”是什么意思
- 菜根谭·明洪应明 - “念头起处·便从理路”是什么意思
- 菜根谭·明洪应明 - “念慈酿和·心洁垂古”是什么意思
- 菜根谭·明洪应明 - “思及生死·超然物外”是什么意思
- 菜根谭·明洪应明 - “急处定脚·险处顾首”是什么意思
- 菜根谭·明洪应明 - “急流通退·与世无争”是什么意思
- 菜根谭·明洪应明 - “性天澄澈济身·谈禅演偈无用”是什么意思
- 菜根谭·明洪应明 - “恩宜后浓·威须先严”是什么意思
- 菜根谭·明洪应明 - “恶人学古·适以济恶”是什么意思
- 菜根谭·明洪应明 - “恶勿即就·善勿即亲”是什么意思
- 菜根谭·明洪应明 - “愈旧愈新·愈淡愈浓”是什么意思
- 菜根谭·明洪应明 - “意情用事·难以久长”是什么意思
- 菜根谭·明洪应明 - “慈悲之念·生生之机”是什么意思
- 菜根谭·明洪应明 - “慎德微事·施恩无报”是什么意思
- 菜根谭·明洪应明 - “戒小人媚·愿君子责”是什么意思
- 菜根谭·明洪应明 - “戒疏于虑·警伤于察”是什么意思
- 菜根谭·明洪应明 - “才极无奇·品极归本”是什么意思
- 菜根谭·明洪应明 - “扫外物之锢·觅本来之用”是什么意思